
Un gemelo digital es una réplica virtual de un objeto físico, persona, sistema o proceso, que trata de simular de forma precisa su comportamiento. El gemelo digital abarca todo el ciclo de vida del objeto, es capaz de simularlo, se actualiza en tiempo real, y extrae información a partir de los datos para ofrecer servicios como el mantenimiento inteligente, optimización o detección de errores en el diseño.
En la literatura académica existen muchas definiciones para gemelo digital. No hay un consenso de cuánto abarca, y es dependiente del dominio sobre el cual se está aplicando. Primero de todo, vamos a intentar arrojar un poco de luz sobre sus capacidades y componentes clave.
Todo comienza con el objeto físico, también conocido como gemelo físico, que puede ser cualquier cosa: un motor, un rodamiento, un parque eólico, una ciudad… Este objeto físico es el punto de partida para crear su contraparte virtual. Como veremos más adelante, este gemelo físico existirá en al menos una fase del ciclo de vida del gemelo digital (DT por sus siglas en ingles, «Digital Twin»), que no necesariamente antes de que exista el DT.
A continuación, se desarrolla una representación virtual de ese sistema, el gemelo digital. Este será utilizado para extraer información de los datos recolectados, tomar decisiones y simular de la mejor forma posible el entorno físico.
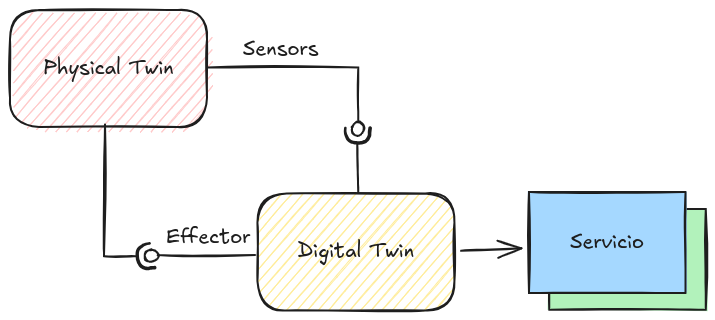
La clave para que esta representación virtual sea un verdadero gemelo digital radica en la conexión bidireccional entre el objeto físico y su gemelo digital. Esta conexión se establece a través de sensores y efectores (sensors y effectors).
Los sensores instalados en el objeto físico recopilan información en tiempo real sobre su estado y rendimiento, y transmiten estos datos al gemelo digital. De esta manera, el gemelo digital puede conocer el estado actual del objeto y aprender sobre su comportamiento mediante el uso de datos históricos.
Por otro lado, el gemelo digital puede influir en el objeto físico a través de los efectores. Estos permiten que el gemelo digital envíe comandos o ajustes al objeto físico, modificando su funcionamiento según sea necesario. No es imprescindible que esta comunicación sea instantánea; la frecuencia de actualización dependerá del dominio y las necesidades específicas de cada caso.
La interacción entre el gemelo digital y el objeto físico no se limita a intercambios automáticos de información. En sistemas más complejos, las decisiones pueden ser tomadas por humanos basándose en la información proporcionada por el gemelo digital.
Por ejemplo, si el gemelo digital de una red eléctrica detecta un aumento anómalo en la demanda de energía en una región específica y, consecuentemente propone un plan de redistribución de carga, aunque tenga que ser un operario el que finalmente ejecute esa acción, se ha utilizado la información obtenida por el DT para tomar una decisión, y afectar al espacio físico.
Por lo tanto, todo este modelo tienen como finalidad el ofrecer servicios. Algunos de estos servicios son el mantenimiento inteligente, la monitorización de estado mediante IoT, el análisis predictivo gracias al machine learning, what-if analysis u optimización con Inteligencia Artificial. Pero, ¿no se están ofreciendo ya todos estos servicios por separado?. En efecto, pero, el valor que nos proporciona el DT, es aglutinar todas estas tecnologías de forma que estas trabajen en la misma dirección y que su valor se multiplique. Esto nos permite tener una visión holística y dinámica de un sistema físico.
Concepto de DT de Grieves
Origen
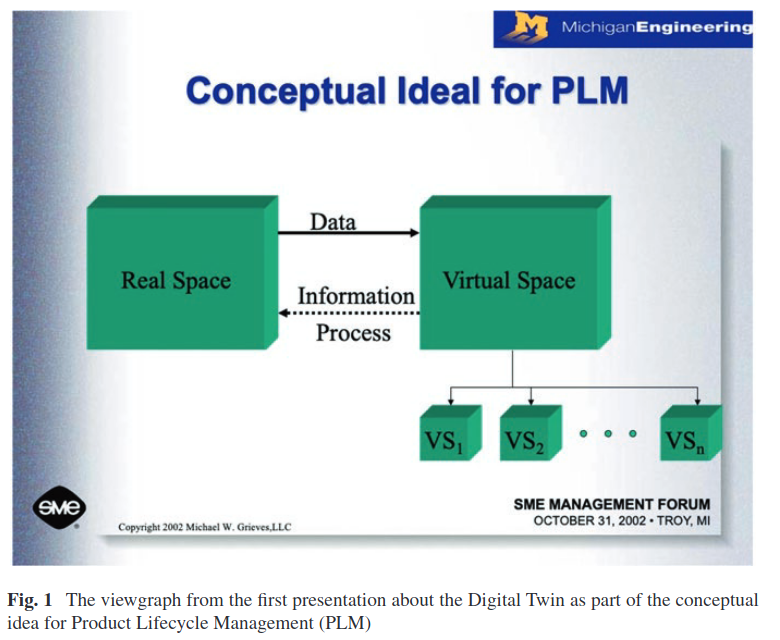
Michael Grieves fue el precursor de la idea de gemelo digital. El concepto fue visto por primera vez en una conferencia de Society of Manufacturing Engineering (SME) en 2002. Fue presentado como The Conceptual Ideal of PLM.
Poco a poco se fue nombrando como gemelo digital. En la actualidad, Grieves sigue defendiendo esta definición de DT, aunque ampliada y adaptada a las necesidades y tecnologías actuales.
Este modelo tiene los 3 componentes clave mencionados anteriormente:
- Espacio físico y sus productos
- Espacio virtual o digital y sus productos
- La conexión entre los dos espacios
En el diagrama se ve un cuarto componente, que no dejan de ser las diferentes instancias del espacio virtual que podemos entender, ya que en la época no estaba tan interiorizado que gracias al virtualizar, se pueden crear copias casi ilimitadas de ese entorno virtualizado y, por ejemplo, hacer pruebas con diferentes escenarios concurrentemente.
Gemelo Digital en la actualidad
Lo define de la siguiente forma. Un Modelo de Gemelo Digital es un concepto que consiste de 3 elementos principales: Un elemento físico real o previsto en el lado izquierdo que existe actualmente o existirá en el mundo físico (el «Physical Twin«), el equivalente virtual o digital en el lado derecho que existe en el mundo virtual o digital (el «Digital Twin» o DT), y el canal de comunicación de datos e información entre estos dos elementos (el «Digital Thread«).
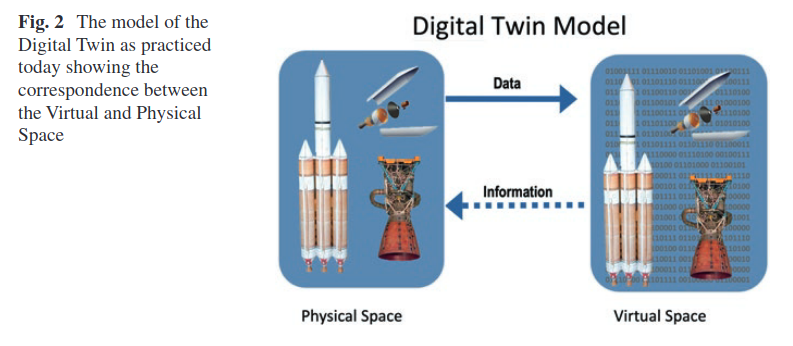
El punto clave es que se quieren mover los datos del espacio físico al espacio virtual para crear e informar el producto virtual. Entonces, se usa esa información obtenida en el gemelo digital en el espacio físico.
Tipos de Gemelo Digital
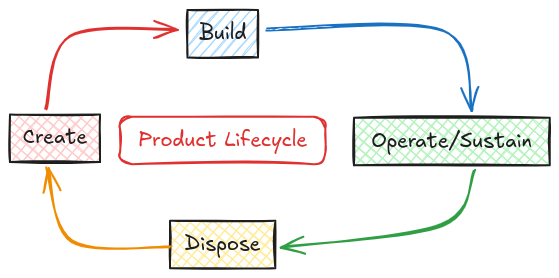
Grieves define los tipos de Gemelo Digital en función de la etapa del ciclo de vida en el que se encuentra el producto en cuestión. El ciclo de vida que defiende es el siguiente:
Los diferentes tipos de DT:
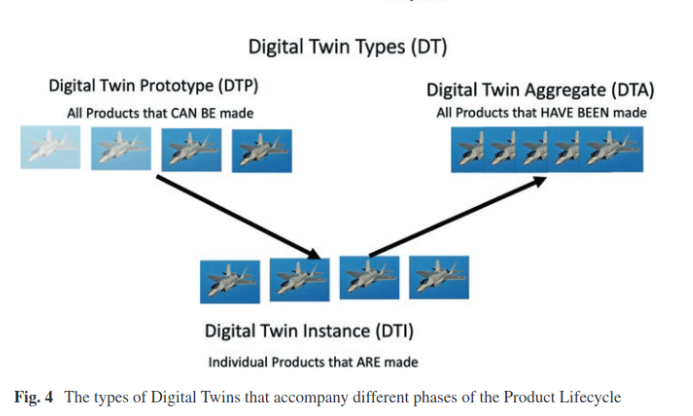
Digital Twin Prototype (DTP)
Durante la fase de «create» es en la cuál se lleva a cabo del diseño del producto. Si asumimos que probar el diseño es más barato en el entorno virtual que en el físico, el ideal es desarrollar el producto lo máximo posible antes de que sea construido. Por lo tanto, DTP es el conjunto de todos los productos y diseños que se hacen durante esta fase, el producto y sus variantes.
Digital Twin Instance (DTI)
Definida como «todos los productos que pueden hacerse». Por cada producto fabricado, se crea un DTI independiente. Mientras que el DTP nos da información sobre las tolerancias que debe tener el producto, el DTI tendrá las medidas reales del objeto.
Digital Twin Aggregate (DTA)
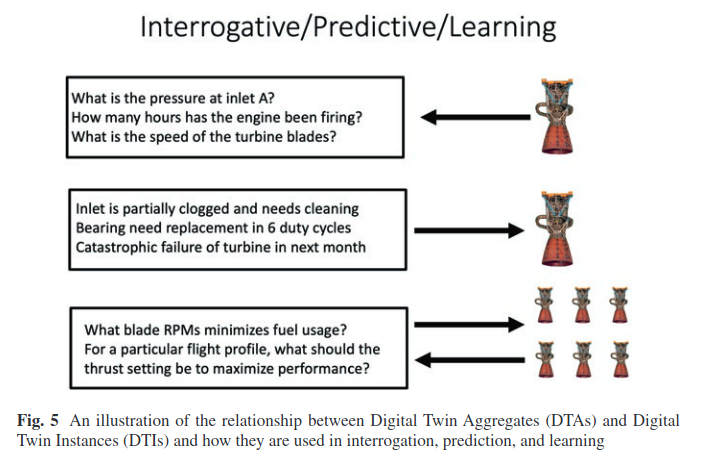
Todos los productos que han sido hechos. Aquí es donde se utilizan todos los datos que extraemos de los DTIs. Es el conjunto de todas las instancias que hemos creado, con las cuales podemos extrapolar la información de una instancia al resto. La siguiente imagen ilustra cómo se pueden utilizar a nivel de aprendizaje.
Como podemos comprobar, la visión de Grieves está completamente enfocada al ciclo de vida del producto (como se conceptualizó) y no tanto a cómo implementarla. Más adelante discutiremos alguna de las ideas que deja en el aire esta definición.
Concepto de DT de Alexander Barbie
A. Barbie, en “From Digital Twins to Digital Twin Prototypes: Concepts, Formalization, and Applications,” replantea una clasificación en la cual existen tres niveles de integración (a partir de la clasificación dada en “Digital Twin in manufacturing: A categorical literature review and classification”, W. Kritzinger) y la extiende para formalizar ciertos conceptos. También numera los principales casos de uso de DT:
- Un modelo utilizado para simulaciones iniciales
- Monitorizar el gemelo físico en tiempo real y actualizar la instancia de ese modelo
- Juntar toda la información necesaria tanto del modelo digital como de software embebido que se necesita para construir el gemelo físico (DTP)
En W. Kritzinger se define 3 subcategorías de DT en función del nivel de integración con el gemelo físico.
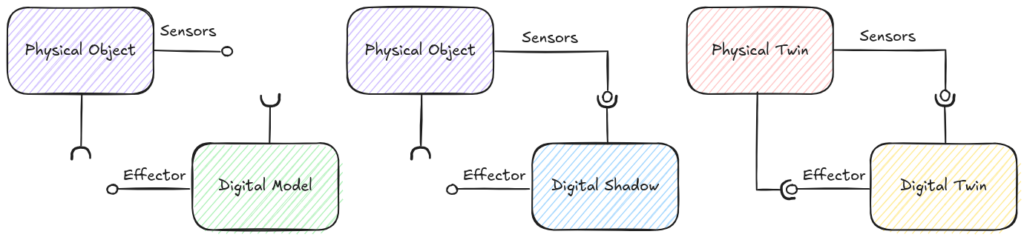
El que esté conectado implica que el flujo de datos es «automático». Por lo tanto, en función de la cantidad de enlaces automáticos que tenga es un tipo u otro.
Este esquema tiene varios problemas, como que no define que es un flujo de datos automático, o que dentro de tipos de DT está DT, lo cual nos lleva a una recursividad infinita.
A continuación, Alexander Barbie define tanto teórica como formalmente los siguientes conceptos, con el fin de alinear la definición y dejar claro que és y qué no es un DT.
El gemelo físico (Physical Twin)
Es el sistema o producto del mundo real. Comprende las capacidades de su software embebido y a los sensores.
El modelo digital (Digital Model)
Es el componente central de un DT. Hay discrepancias en los trabajos académicos sobre lo que es un modelo digital, no suele definirse tanto como debería. Se podría definir como un modelo que describe un objeto, un proceso o una agregación compleja de estos. Puede estar definido matemáticamente o con un software digital de diseño.
La Plantilla Digital (Digital Template)
Sirve como framework que puede adaptarse o completarse con información específica, con el fin de generar el gemelo físico. Dentro de esta podriamos encontrar el software que va a utilizar, el modelo digital, entre toda la información y documentación como planes de producción, planos, manuales ténicos etc.
El Hilo Digital (Digital Thread)
Es el framwork que permite un flujo de datos conectado e integrado de los datos del gemelo físico y operaciones a lo largo de su ciclo de vida
La Sombra Digital (Digital Shadow)
Es la suma de todos los datos recolectados por el sistema embebido de sensores, procesamiento o actuadores. La conexión del gemelo físico a la sombra digital está automatizada. Todos los cambios que haya en el gemelo físico se reflejan en la sombra digital pero no al revés.
Al considerar que para que sea un gemelo digital tiene que haber un flujo de datos automático desde el gemelo digital hacia el gemelo físico, hace que la mayoría de proyectos que se consideran «gemelo digital» realmente sean una sombra digital, ya que no existe esa capacidad del gemelo digital de actuar de forma directa y autónoma sobre el gemelo físico.
El Gemelo Digital (Digital Twin)
Es un modelo digital de una entidad real, el gemelo físico. Es tanto una sombra digital que refleja el estado/operación de su gemelo físico, como un hilo digital que registra la evolución del gemelo físico a lo largo del tiempo. El gemelo digital está conectado al gemelo físico durante todo el ciclo de vida para el intercambio automatizado de datos bidireccional, es decir, los cambios realizados en el gemelo digital provocan cambios del gemelo físico y viceversa.
Prototipo de Gemelo Digital (Digital Twin Prototype)
La idea es que DT apoye a la hora de realizar el desarrollo del producto físico. Pero a la hora de desarrollarlo, nos encontramos con el problema de que es muy difícil emular toda la parte de comunicación entre el gemelo físico (que todavía no existe) y el digital.
Es aquí donde se define este concepto de prototipo de gemelo digital. Es el prototipo del software de un gemelo físico. Las configuraciones son las mismas, pero los sensores y actuadores son emulados.
Esto lo que nos permite es que, conectando este DTP (Digital Twin Prototype) al gemelo digital, podemos seguir desarrollandolo y probandolo aunque no tengamos todavía gemelo físico.
Resumen
Propone un esquema que quedaría de la siguiente forma:
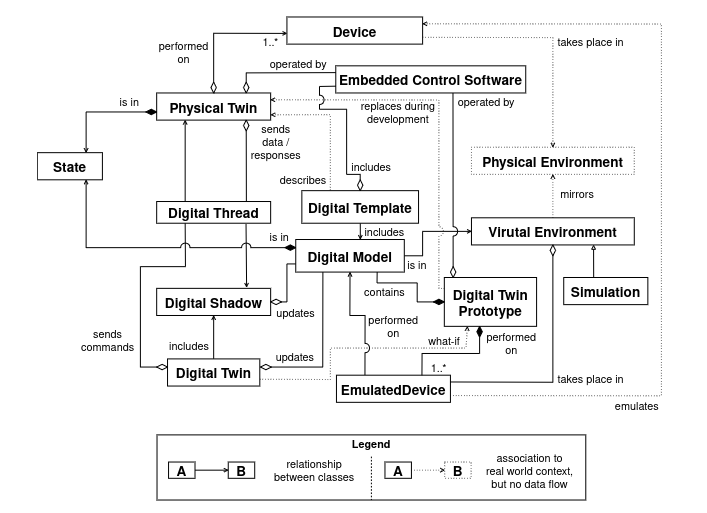
En la formalizacion presentada de DS y DT, DS no envia datos al gemelo fisico. Todos los cambios de estado son recibidos por la sombra digital, que cambia el modelo digital. Solo el DT cambia el estado del gemelo fisico.
La idea es que en el esquema, el prototipo de gemelo digital y el gemelo físico son intercambiables. Es decir, el software ni si quiera reconoce si se está usando hardware simulado o real. Esto permite que se pueda hacer testing automático durante el desarrollo del DT (aunque la calidad de los datos emulados es un cuello de botella importante).
Tambien cabe destacar que el modelo digital usado por el DTP es una instancia diferente al modelo digital acutalizado por la sombra digital.
De esta forma, se asignan responsabilidades a cada uno de los componentes del DT, que de forma independiente ya proporcionan valor añadido, pero que al trabajar en conjunto es cuando se alcanza el verdadero potencial de DT.
| Concept | Primary Use Case |
|---|---|
| Digital Model | A snapshot of a mathematical model or computer-aided design used primarily for initial simulations. |
| Digital Shadow | Monitors the corresponding physical twin in (near) real-time and internally updates an instance of the digital model. |
| Digital Twin | Operates and monitors the corresponding physical twin in (near) real-time and internally updates an instance of the digital model. |
| Digital Template | Bundles all information, the digital model, and the embedded software system required to build the physical twin. |
| Digital Twin Prototype | Contains the physical twin’s embedded software system but uses emulators instead of real sensors/actuators. Replaces the physical twin during development and in CI/CD pipelines. |
Conclusiones
Comparando los dos puntos de vista, vemos que el concepto que tienen de DT es bastante diferente. Por ejemplo, DTP (Digital Twin prototype), para Grieves es todo lo que se construye y el conocimiento adquirido en la etapa de diseño (create) del gemelo digital, mientras que para Barbie es un sustituto del gemelo físico para ayudar al desarrollo del DT.
Pero la mayor incongruencia entre definiciones se ve en la propia definición de DT. Ambos comporten la idea de que entre la entidad física y la virtual tiene que haber un flujo de datos e información bidireccional. La diferencia radica en que Barbie considera que para que sea un DT ese flujo de información tiene que ser automático. Es decir, si el gemelo digital nos proporciona una información y realizamos una acción sobre el gemelo físico en base a esa información (por ejemplo cambiar un disco duro si se predice que se va a estropear), claramente ha habido un flujo de información del gemelo digital hacia el gemelo físico, PERO no ha sido automático. En cambio Grieves si que ve esto como un gemelo digital válido.
Si seguimos la definición de Barbie, casi todo lo que hoy en día se nombra como gemelo digital, no lo es realmente, ya que el gemelo digital no tiene esa autonomía de afectar independientemente al gemelo físico (ej. gemelos digitales del cuerpo humano, que en la mayoría de casos no tienen esos actuadores). Según Barbie, encajan más en la definición de Sombra Digital.
Grieves explica por qué se opone al concepto de «digital shadow» argumentando que, si no hay un flujo de información de la sombra digital al objeto físico, esta se convierte en una especie de «agujero negro» de datos, donde estos entran para nunca salir, y nunca provocar un efecto en el mundo físico.
Él piensa que esta categorización no añade valor y que, por lo que crea confusión, pues introduce distinciones innecesarias entre tipos de gemelos digitales que deberían unificarse bajo una definición más coherente y práctica. Por lo tanto, piensa que, al igual que una sombra, este concepto está condenado a desvanecerse poco a poco.
Entonces, ¿por qué se da esta discrepancia entre definiciones en la literatura académica? La razón es que se define DT a un alto nivel, por lo que al adaptarlo a un dominio específico y tratar de resolver los problemas que este modelo propone, cada uno toma la decisión de diseño que más le conviene en ese momento.
Por lo tanto, existe una brecha significativa entre la literatura científica y la práctica industrial, así como entre los distintos dominios que aplican este concepto. En futuros trabajos, se espera que el concepto de gemelo digital se unifique progresivamente y que las herramientas que facilitan su implementación evolucionen en consecuencia, promoviendo una comprensión más coherente y alineada entre teoría y aplicación práctica.
Fuentes
A. Barbie and W. Hasselbring, “From Digital Twins to Digital Twin Prototypes: Concepts, Formalization, and Applications,” IEEE Access, vol. 12, pp. 75337–75365, 2024, doi: 10.1109/ACCESS.2024.3406510.
W. Kritzinger, M. Karner, G. Traar, J. Henjes, and W. Sihn, “Digital Twin in manufacturing: A categorical literature review and classification,” IFAC-PapersOnLine, vol. 51, no. 11, pp. 1016–1022, Jan. 2018, doi: 10.1016/j.ifacol.2018.08.474.
D. Lehner et al., “Digital Twin Platforms: Requirements, Capabilities, and Future Prospects,” IEEE Software, vol. 39, no. 2, pp. 53–61, Mar. 2022, doi: 10.1109/MS.2021.3133795.