
Etiqueta: Gemelo Digital
-
Optimización con Dask y Parquet
En el contexto de un proyecto reciente de análisis de datos de sensores de drones, me enfrenté a un desafío común en la ingeniería de datos y ML: la brecha entre el volumen de los datos brutos y los recursos de hardware disponibles. Este artículo detalla la transición técnica de un flujo de trabajo basado…
-
Dask: Computación Paralela y Distribuida para la Ciencia de Datos
Dask es una biblioteca de código abierto diseñada para permitir el procesamiento eficiente de datos a gran escala y la ejecución de tareas de computación intensiva, superando las limitaciones de herramientas como Pandas y NumPy cuando el volumen de datos excede la memoria RAM de una única máquina. ¿Qué es Dask y Por Qué Utilizarlo?…
-
Gym Pybullet Drones
En los últimos años han aparecido múltiples librerías para simular robots en 3D, pero pocas se centran específicamente en drones ligeros y, al mismo tiempo, ofrecen una interfaz limpia para control y aprendizaje por refuerzo. gym-pybullet-drones es una de las que mejor resuelve ese problema. Se trata de un entorno construido sobre PyBullet, orientado a…
-
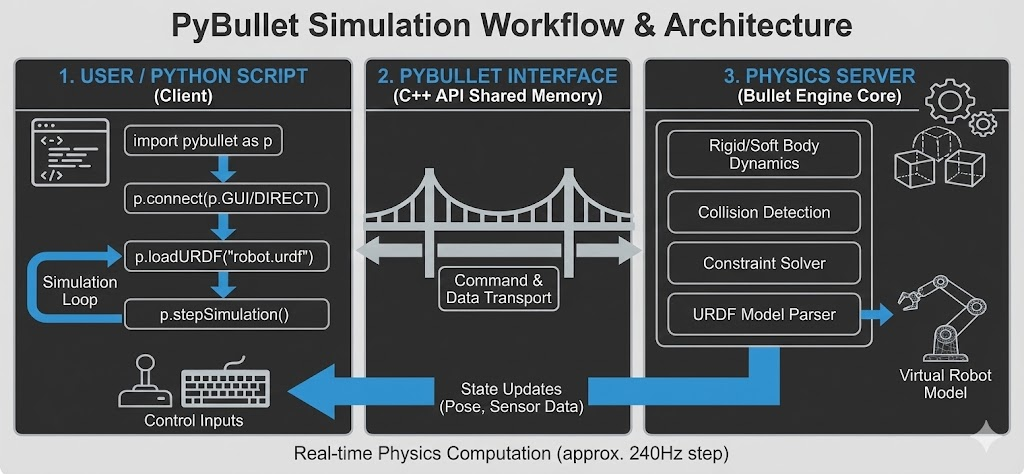
PyBullet
PyBullet es un motor de simulación física en Python diseñado para trabajar con entornos 3D, robótica, dinámica de cuerpos rígidos y control. Su objetivo es ofrecer una herramienta accesible para investigadores, ingenieros y desarrolladores que necesitan un entorno reproducible donde probar algoritmos antes de pasarlos al mundo real. Aunque es ligero y fácil de usar,…
-
La Estructura Oculta del Gemelo Digital Industrial
Introducción: Más Allá de la Réplica Virtual Cuando hablamos de Gemelo Digital (Digital Twin), la primera imagen que nos viene a la mente es una réplica 3D de un activo físico, sincronizada en tiempo real. Esto es correcto, pero se queda en la superficie. Para que un Gemelo Digital sea una herramienta eficaz en el…
-
Modelando dependencias complejas con Cópulas
En entradas anteriores ya mostramos cómo los Modelos de Mezclas Gaussianas (GMM) pueden reproducir con éxito el comportamiento de motores de helicóptero, mejorando la detección de anomalías incluso con pocos datos. Sin embargo, los GMM no son la única forma de abordar el problema. En esta línea, decidimos explorar otra técnica más general y flexible…
-
Generando datos sintéticos realistas con Modelos de Mezclas Gaussianas (GMM)
Uno de los mayores retos en el mantenimiento predictivo del sector aeroespacial es la falta de datos representativos, especialmente de fallos reales (como ya hemos visto en entradas anteriores). En motores de helicópteros o aeronaves, los sistemas de control y supervisión recogen miles de variables en tiempo real, pero casi todos esos registros pertenecen a…
-
Argo Workflows
En el mundo real, los proyectos de datos rara vez se componen de una única ejecución lineal de código. En cambio, suelen implicar múltiples pasos interdependientes: descarga de datos, preprocesamiento, validaciones, entrenamiento de modelos, pruebas, despliegues, generación de informes… Todo esto en diferentes entornos, con distintas configuraciones, y muchas veces ejecutado de forma periódica o…
-
Redes Bayesianas para la generación de datos sintéticos
Las redes Bayesianas se basan en las reglas de probabilidad, y mas concretamente en el Teoremas de Bayes: Este teorema nos permite crear estructuras de redes que codifican las relaciones que hay entre las diferentes variables (maravillosas las matemáticas). Esto se representa con nodos (que simbolizan a las variables) y flechas (que simbolizan las relaciones…
-
Introducción a Prefect
Si trabajas en ciencia de datos, probablemente esta historia te suene familiar: empiezas en un notebook, explorando y limpiando datos. Luego, ese notebook se convierte en un script de Python. Pronto, tienes varios scripts: uno para preprocesar los datos, otro para entrenar el modelo, un tercero para generar resultados… y te encuentras con que tienes…