
A continuación vamos a ver la implementación de un modelo basado en física (Physic Based), presentados en la entrada Modelos Basados en la Física, mediante la utilización de Simulink con el entorno de Matlab.
Ejemplo Physics-Based para un Gemelo Digital de Bomba Hidráulica
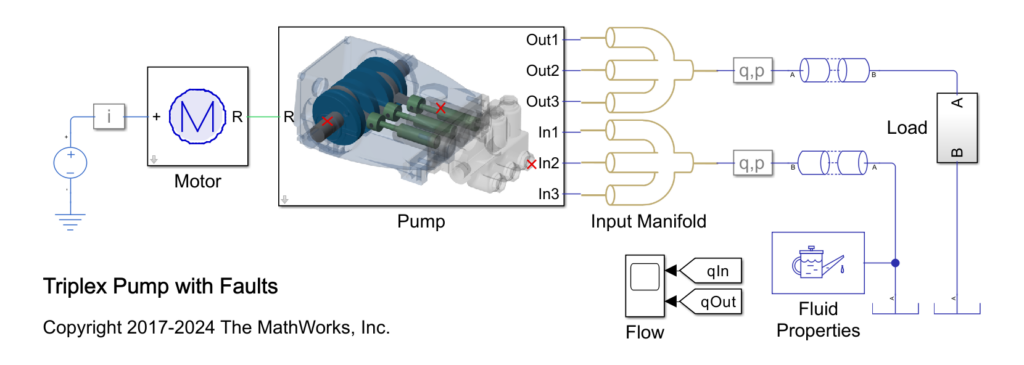
En este ejemplo, presentamos un modelo de bomba hidráulica desarrollado en Simulink. El sistema incluye un colector de entrada (input manifold), el bloque de la bomba y un componente Load que consume el flujo generado. Un motor eléctrico impulsa el mecanismo interno de la bomba.
Parámetros del Modelo
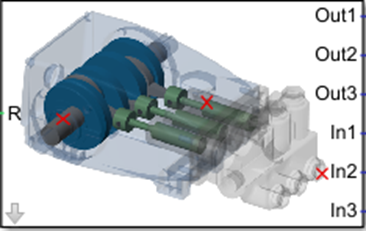
Al cargar el modelo, pueden ajustarse diversas propiedades: dimensiones de cilindros, fricción, propiedades del fluido hidráulico o configuraciones de las válvulas. Además, existen tres posibles fallos:
- Fuga en el sellado
- Obstrucción en la entrada de fluido
- Desgaste en los rodamientos
Señales de Salida
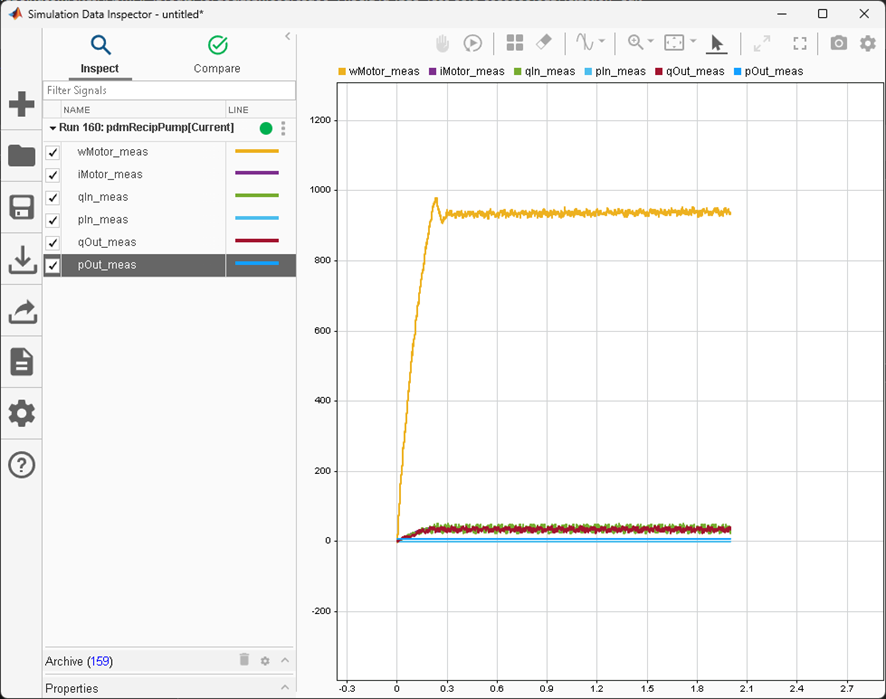
Tras la simulación, en el Data Inspector se observan las mediciones de los sensores (activados con log signal data). Las señales de interés son:
- wMotor_meas: Velocidad angular del motor.
- iMotor_meas: Corriente eléctrica medida en el motor.
- qIn_meas: Flujo volumétrico de entrada.
- qOut_meas: Flujo volumétrico de salida.
- pIn_meas: Presión en la entrada.
- pOut_meas: Presión en la salida.
Ejecución de la simulación
Los fault parameters ajustan la severidad de los fallos:
- leakArea (LeakFault): Área de fuga.
- blockingFactor (BlockingFault): Grado de bloqueo en la entrada.
- bearingFactor (BearingFault): Desgaste en el cojinete.
Cada uno se configura para cada ejecución dentro de un ensemble de simulaciones.
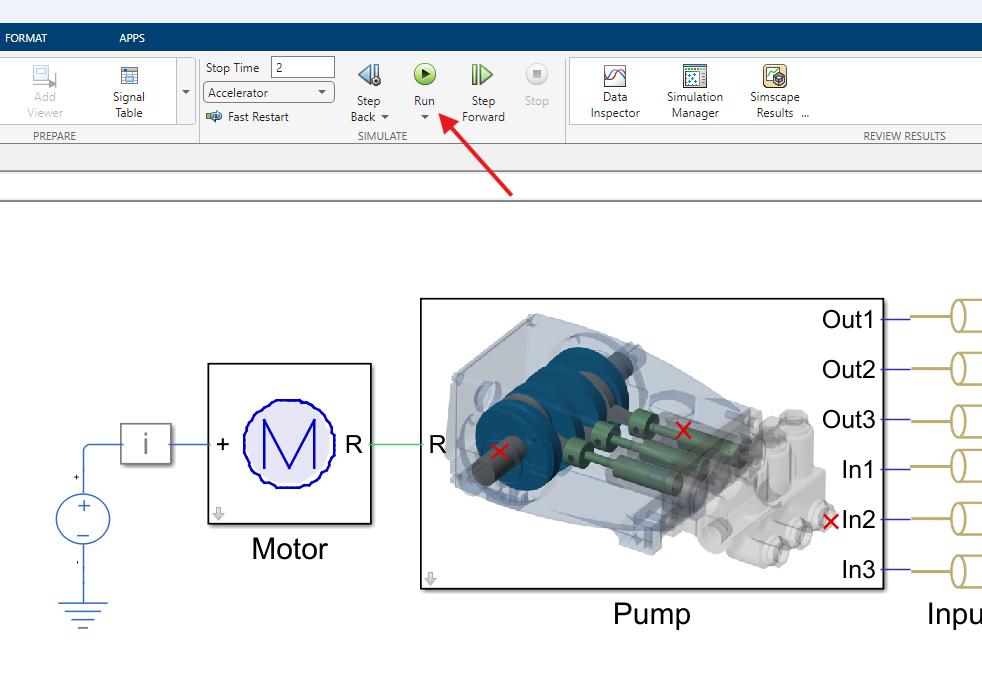
Una vez ajustado, se puede realizar la simulación o bien mediante código o a través de la interfaz gráfica:
Observaciones finales
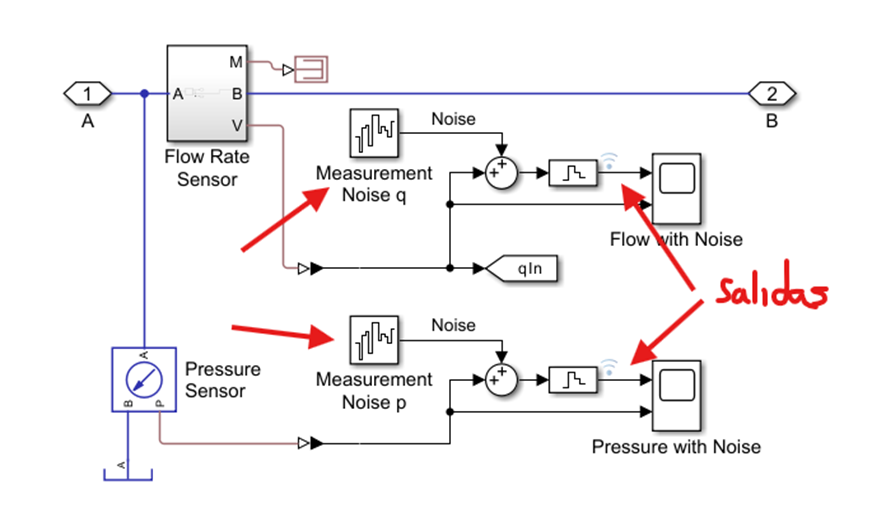
El modelo introduce ruido aleatorio en las mediciones para reflejar la variabilidad real de los sensores. Así, aunque se repitan los mismos parámetros de entrada, cada simulación generará pequeños cambios en los resultados.
Este enfoque physics-based es clave para desarrollar y validar gemelos digitales, permitiendo experimentar virtualmente con fallos y comportamientos, antes de llevarlos a la práctica en sistemas reales.