PyBullet es un motor de simulación física en Python diseñado para trabajar con entornos 3D, robótica, dinámica de cuerpos rígidos y control. Su objetivo es ofrecer una herramienta accesible para investigadores, ingenieros y desarrolladores que necesitan un entorno reproducible donde probar algoritmos antes de pasarlos al mundo real. Aunque es ligero y fácil de usar, integra un conjunto de funcionalidades suficientemente sólido como para soportar aplicaciones en robótica, aprendizaje por refuerzo y prototipado de gemelos digitales.
Un motor de física orientado a la experimentación
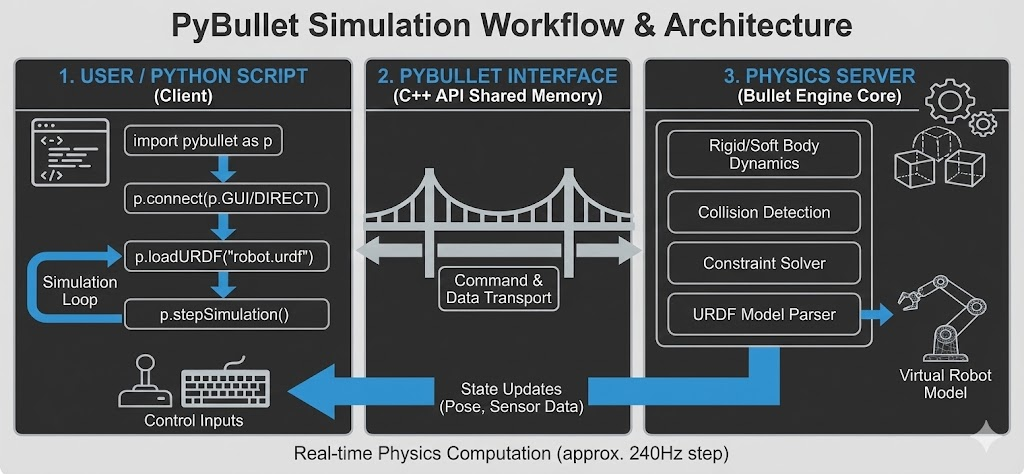
PyBullet es la interfaz en Python de Bullet Physics, un motor que lleva años utilizándose en videojuegos, robótica e investigación. A través de unas pocas funciones permite crear mundos con gravedad, objetos rígidos, sensores simulados y actuadores. La simulación es determinista siempre que se fijan las semillas aleatorias, lo que facilita reproducir experimentos, medir el impacto de cambios en los algoritmos y comparar resultados.
La base del sistema es el simulation loop: un ciclo repetitivo donde, en cada paso, PyBullet integra las ecuaciones de movimiento, detecta colisiones, aplica fuerzas y actualiza el estado del entorno. Sobre este bucle se construyen los comportamientos más complejos.
Cómo se modela un entorno
Los objetos del mundo se describen normalmente mediante URDF, SDF u otros formatos de modelado que definen geometrías, articulaciones, límites y propiedades físicas. PyBullet permite cargar estos modelos con una sola llamada y obtener acceso directo a sus articulaciones, fuerzas y sensores simulados. Esto es especialmente útil en robótica, porque reproduce de forma razonable la cinemática y la dinámica de brazos, drones y manipuladores móviles.
Además de los cuerpos rígidos, PyBullet soporta colisiones complejas, detección de contacto, planos infinitos, campos de gravedad personalizados y cámaras virtuales desde las que capturar imágenes RGB, profundidad y segmentación.
Interacción desde Python
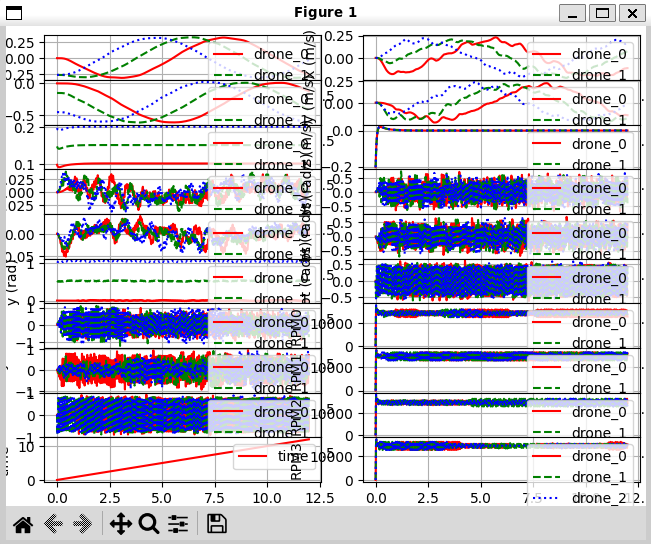
Una de sus ventajas es lo sencillo que resulta interactuar con el entorno. Desde Python es posible, en tiempo real, aplicar torques a las articulaciones de un robot, leer sus posiciones, modificar la gravedad, introducir ruidos o generar perturbaciones controladas. La API es directa y transparente, algo que facilita la integración con librerías de control, aprendizaje por refuerzo o experimentación algorítmica.
En este sentido, PyBullet se ha consolidado como un estándar de facto en tareas de reinforcement learning, porque permite lanzar miles de episodios simulados sin necesidad de hardware físico y con tiempos de ejecución muy reducidos.
Visualización y modo headless
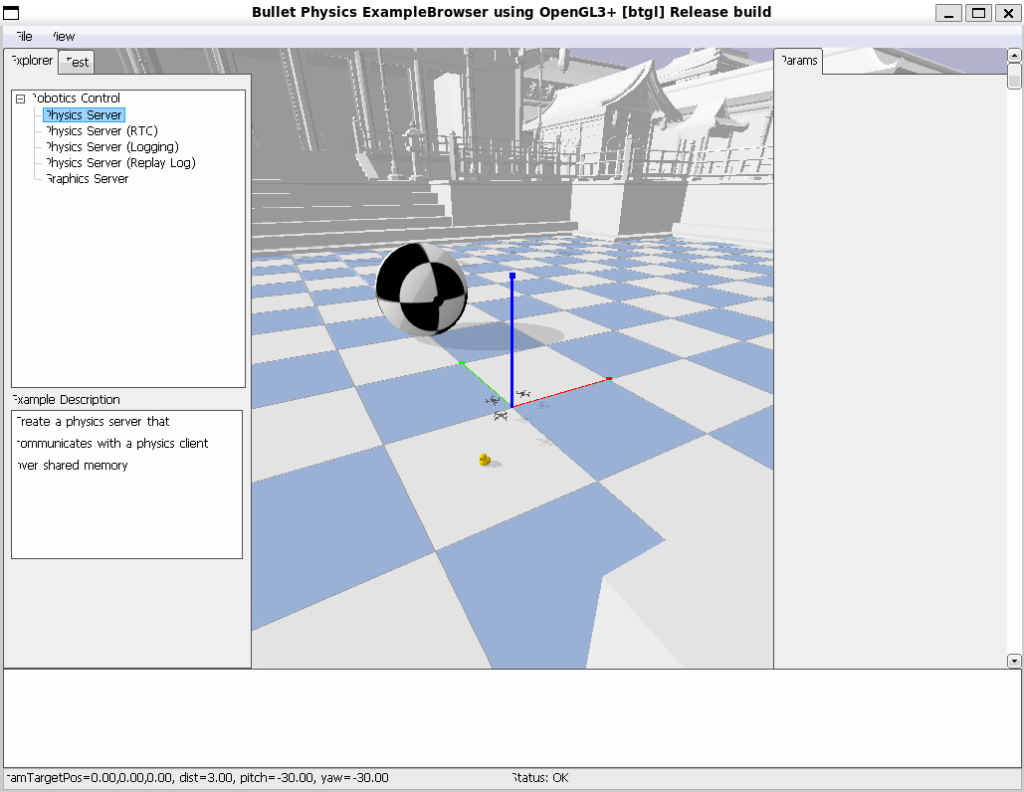
La simulación puede ejecutarse con un visor gráfico integrado, útil para depurar comportamientos o estudiar colisiones. Sin embargo, muchos proyectos utilizan PyBullet en modo headless, sin interfaz visual, para acelerar las simulaciones o desplegarlas en servidores remotos y contenedores. El comportamiento es idéntico en ambos modos, lo que facilita mover un experimento desde el entorno local a un entorno de computación de mayor escala.
Un ecosistema fácil de integrar
PyBullet no intenta ofrecer un entorno cerrado ni cubrir todos los casos de uso. Su fortaleza está en ser una herramienta flexible, rápida y mínima, sobre la que cada desarrollador puede construir su propio pipeline: simulación de robots, pruebas de algoritmos de control, generación sintética de datos, evaluación de agentes de RL o validación de prototipos antes de ensamblar el hardware.
Su ecosistema de ejemplos y documentación permite empezar en pocos minutos, pero también crecer hacia simulaciones más sofisticadas cuando el proyecto lo necesita.
Conclusión
PyBullet se ha convertido en una posibilidad a tener en cuenta para cualquier proyecto que requiera simular física realista en Python sin demasiadas complicaciones. Es suficientemente simple como para aprenderlo en una tarde, pero lo bastante robusto como para soportar experimentos complejos en robótica, control y aprendizaje por refuerzo. No sustituye a un simulador industrial ni pretende competir con entornos más pesados, pero ofrece un equilibrio muy valioso entre velocidad, realismo y accesibilidad.
Si trabajas con algoritmos que van a interactuar con el mundo físico, PyBullet es una herramienta a tener en cuenta antes de pasar a pruebas en hardware real.