
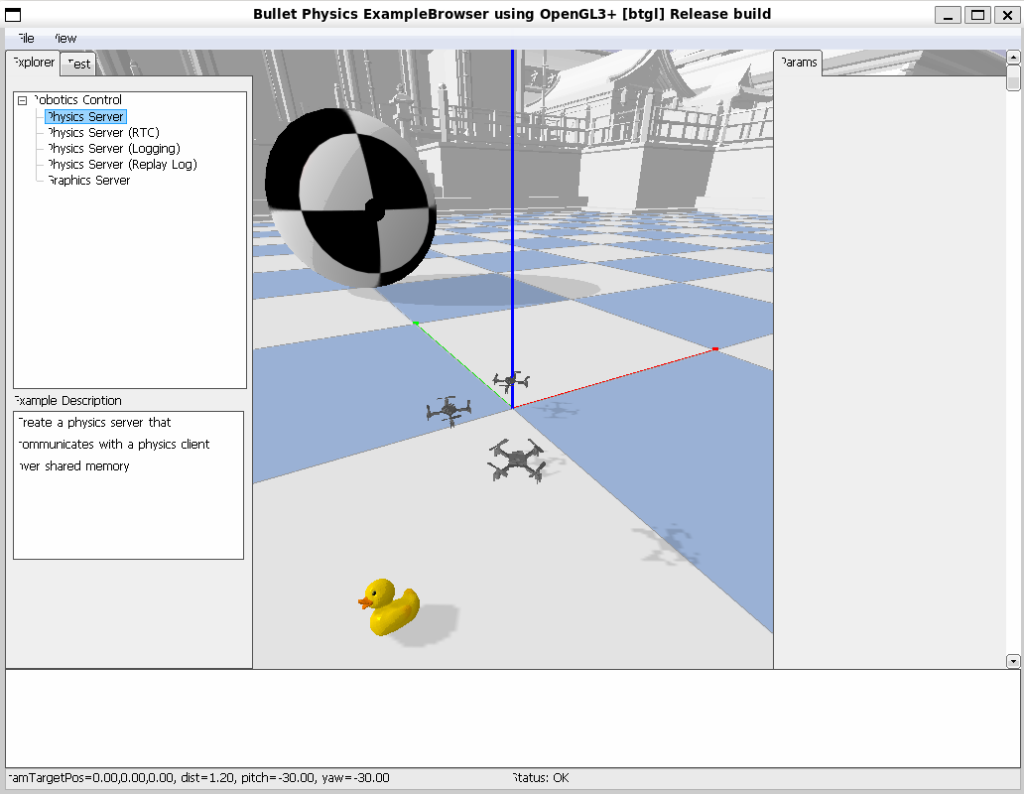
En los últimos años han aparecido múltiples librerías para simular robots en 3D, pero pocas se centran específicamente en drones ligeros y, al mismo tiempo, ofrecen una interfaz limpia para control y aprendizaje por refuerzo. gym-pybullet-drones es una de las que mejor resuelve ese problema. Se trata de un entorno construido sobre PyBullet, orientado a la investigación y experimentación con cuadricópteros, tanto en escenarios individuales como multi-agente. Para quienes ya conozcan PyBullet (Léase la entrada anterior), este proyecto puede verse como una capa adicional que estructura y ordena todo lo necesario para trabajar con drones de forma directa, sin tener que construir la simulación desde cero.
El modelo dinámico que utiliza por defecto está basado en el Crazyflie 2.x, un dron muy popular en investigación por su tamaño y su comportamiento estable. El simulador implementa la dinámica de un cuadricóptero clásico: fuerzas de empuje, momento de giro, aerodinámica básica y los acoplamientos entre los ejes de rotación. Además, incorpora fenómenos más complejos como el downwash entre drones, lo que permite estudiar formaciones de vuelo o maniobras coordinadas sin caer en simplificaciones excesivas. Aunque no pretende reproducir cada detalle del comportamiento real, la física es lo bastante consistente para evaluar controladores y algoritmos de aprendizaje de forma fiable.
Una de las características más útiles es que el entorno está diseñado desde el primer momento para ser compatible con Gymnasium (la evolución de OpenAI Gym). Esto significa que cada entorno sigue el mismo patrón de interacción: reset(), step(action), observation, reward, terminated y truncated. La consecuencia práctica es que cualquier algoritmo de aprendizaje por refuerzo (ya sea PPO, SAC, TD3, A2C o un método multi-agente) puede conectarse sin necesidad de escribir adaptadores o funciones puente. El flujo de datos es idéntico al de un entorno clásico de RL, pero aplicado a un dron completo con sensores simulados, colisiones, ruido y una cinemática realista. Para control más tradicional, la API permite leer estados, aplicar acciones en forma de RPM, torques o fuerzas, modificar la gravedad, añadir perturbaciones y acceder a la posición y actitud del dron con gran detalle.
gym-pybullet-drones también facilita trabajar con múltiples drones simultáneamente. La simulación puede integrar varios agentes en el mismo mundo compartido, con sus dinámicas individuales, colisiones y efectos aerodinámicos entre ellos. Esto abre la puerta a experimentos de enjambres, estrategias de cooperación y estudios sobre estabilidad en vuelo coordinado. Tanto la versión con renderizado como el modo headless están disponibles, por lo que es posible ejecutar miles de episodios en servidores, contenedores o clusters sin interfaz gráfica.
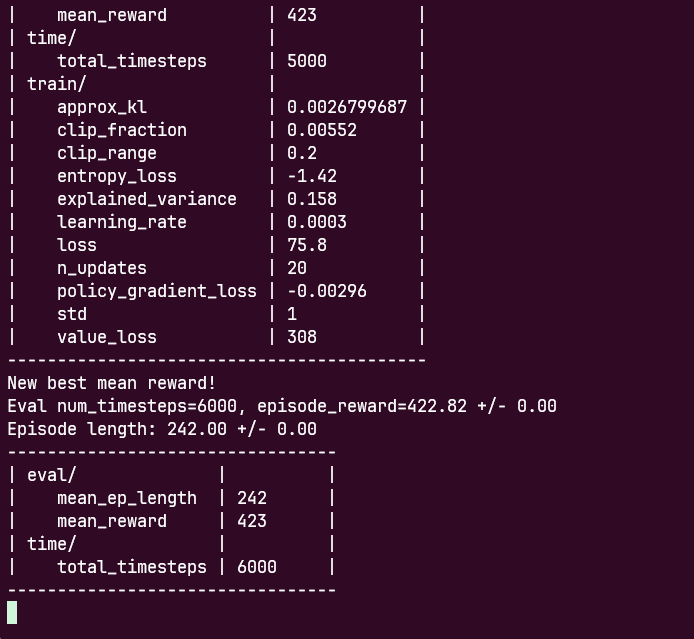
El proyecto incluye implementaciones de referencia de controladores PID y de vuelo en posición, lo que resulta útil para validar que la simulación está configurada correctamente antes de pasar a algoritmos más avanzados. También incorpora ejemplos completos de entrenamiento con Stable Baselines3, además de escenarios diseñados para simular tareas concretas: mantener un dron en hovering, seguir trayectorias, navegar entre obstáculos o coordinar varios drones a la vez. El nivel de detalle técnico es suficientemente alto para entender qué ocurre en cada paso de simulación, pero al mismo tiempo mantiene una estructura clara para evitar que uno se pierda entre parámetros físicos y constantes poco relevantes.
Aunque no es un simulador industrial ni pretende competir con herramientas de propósito más pesado, gym-pybullet-drones logra un equilibrio razonable entre realismo, simplicidad y velocidad. Es una plataforma ligera donde se pueden probar ideas, comparar controladores y entrenar agentes de RL sin preocuparse por la infraestructura de simulación. Y como se apoya en PyBullet, cualquier mejora o adaptación que hayas hecho anteriormente en ese entorno encaja aquí de forma relativamente natural.
En definitiva, es una herramienta útil para quienes necesiten un entorno práctico, reproducible y accesible para experimentar con drones en Python. Ni más ni menos: un simulador bien construido que permite centrarse en el algoritmo, no en el andamiaje. Si trabajas con control, aprendizaje por refuerzo o simplemente quieres un entorno sólido para probar ideas antes de pasar a hardware real, gym-pybullet-drones merece estar en tu conjunto de herramientas.